Advanced Lane Finding¶
In this project, we will identify lanes in highway images and videos. To accomplish this, we use the following pipeline:
- Calibrate the camera using checkerboard images, and use the obtained coefficients to undistort the subsequent images.
- Change the perspective of the images, so that the images appear to be take form a top-down (birdseye) view.
- Mask the images and apply some colorspace transforms to produce a binary image indicating which pixels are lane pixels.
- Fit 2nd order polynomials to the lanes.
Programmatically, we accomplish that thusly:
import cv2
import points
import calibrationParams
from undistorter import Undistorter
from warper import Warper
import masker
from lanes import LaneFinder
import matplotlib.pyplot as plt
%matplotlib inline
# Load an image
bgr = cv2.imread('test_images/straight_lines1.jpg')
rgb = cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB)
# Get the checkerboard points in 2D and 3D space from a sequence of checkerboard images
objpoints, imgpoints = points.get()
# Compute the calibration parameters
ret, mtx, dist, rvecs, tvecs = calibrationParams.get(objpoints=objpoints, imgpoints=imgpoints, width=1280, height=720)
# Create the object which can undisort images
undistorter = Undistorter(mtx,dist)
undistorted = undistorter.undistort(rgb)
# Create the object which can warp an image to the desired birdseye view
warper = Warper()
warped = warper.warp(undistorted)
# Mask the image to hide all of the non-lane pixels
masked = masker.mask(warped)
# Detect the lanes in the image
laneFinder = LaneFinder( undistorter=undistorter, warper=warper )
lanesDrawn = laneFinder.find(rgb)
# Show the step-by-step results
images = [ rgb , undistorted , warped , masked , lanesDrawn ]
labels = [ 'rgb', 'undistorted', 'warped', 'masked', 'lanesDrawn' ]
graysc = [ False, False, False, True, False ]
fig, ax = plt.subplots(1,len(images))
fig.subplots_adjust(hspace=0, wspace=0, bottom=0, left=0, top=1, right=1)
fig.set_size_inches(15,15)
for a, image, label, gray in zip( ax, images, labels, graysc ):
if gray:
a.imshow( image, cmap='gray' )
else:
a.imshow( image )
a.set_title(label)
a.axis("off")

In the end, we will be able to detect lanes in still images and videos, as demonstrated in the following videos:
Camera Calibration¶
To be able to compute distance and other parameters from images, we need to calibrate the camera. This means removing curvature and other abnormalities from the image so that straight lines in real life are represented as straight lines in the images. Fisheye lenses are the most common and obvious example of a situation in which a lens intentionally distorts images, but aside from high-end photography equipment, all cameras will have at least a little bit of distortion. So the first thing we need to do is to remove all of the distortions.
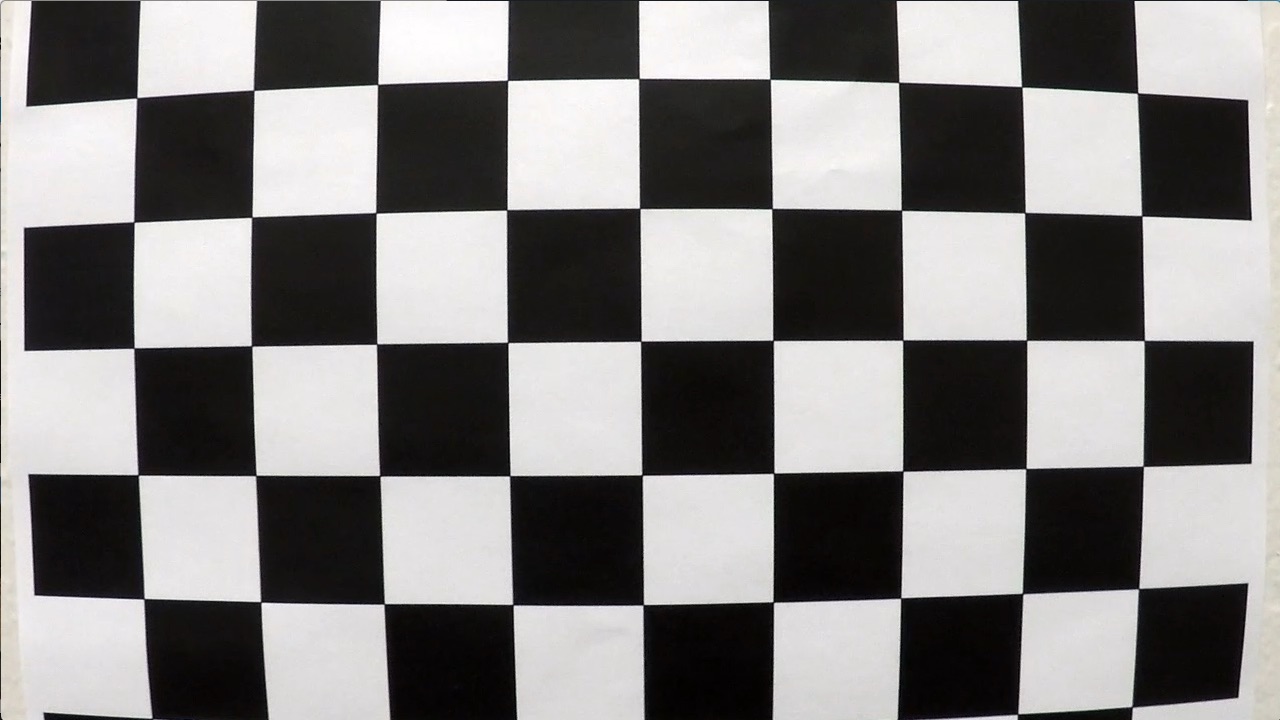
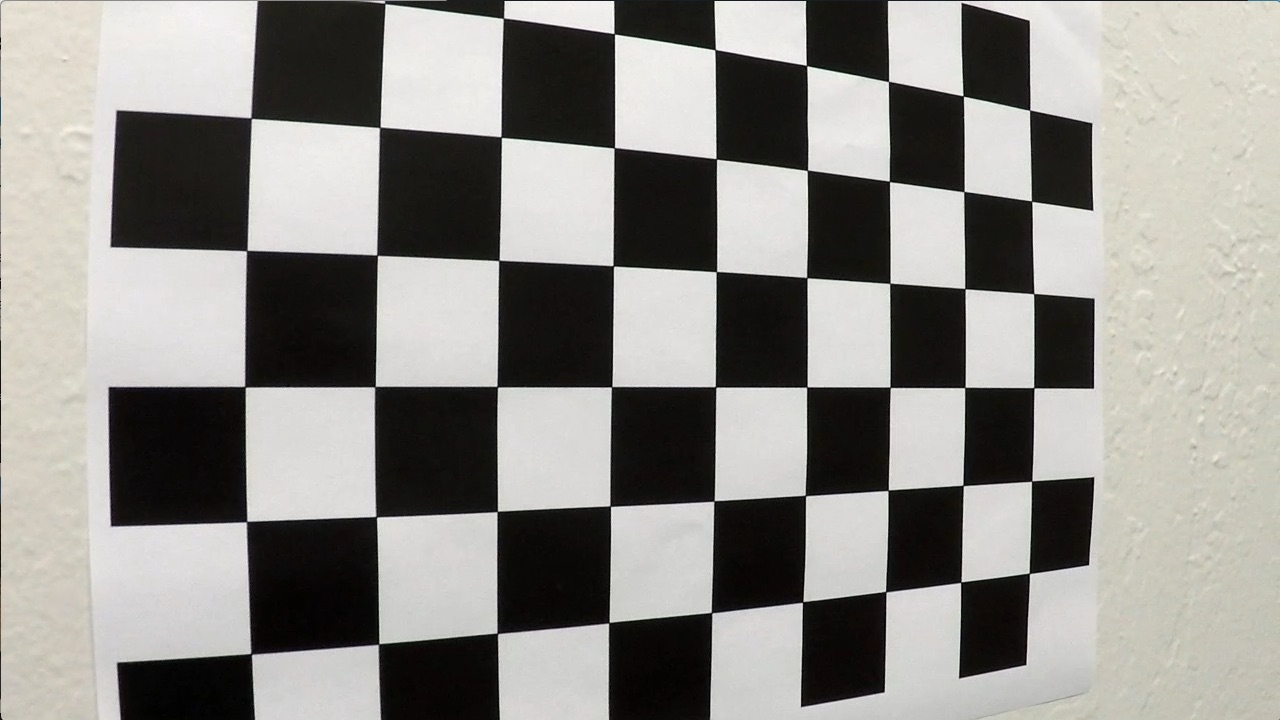
To know how a camera is distorting images, we need to take pictures of points with known locations, and compare them to where they occur in the actual images. Using such data, we can essentially perform a fancy curve fit to determine how the camera is distorting images. It is particularly important to take images near the edges because they tend to be the most distorted areas, and to remove such distortions, we need to have examples of how a known pattern appears in each region of the image. For example, this is a picture taken from our camera before calibration:
<img width=40% src = 'camera_cal/calibration1.jpg' />
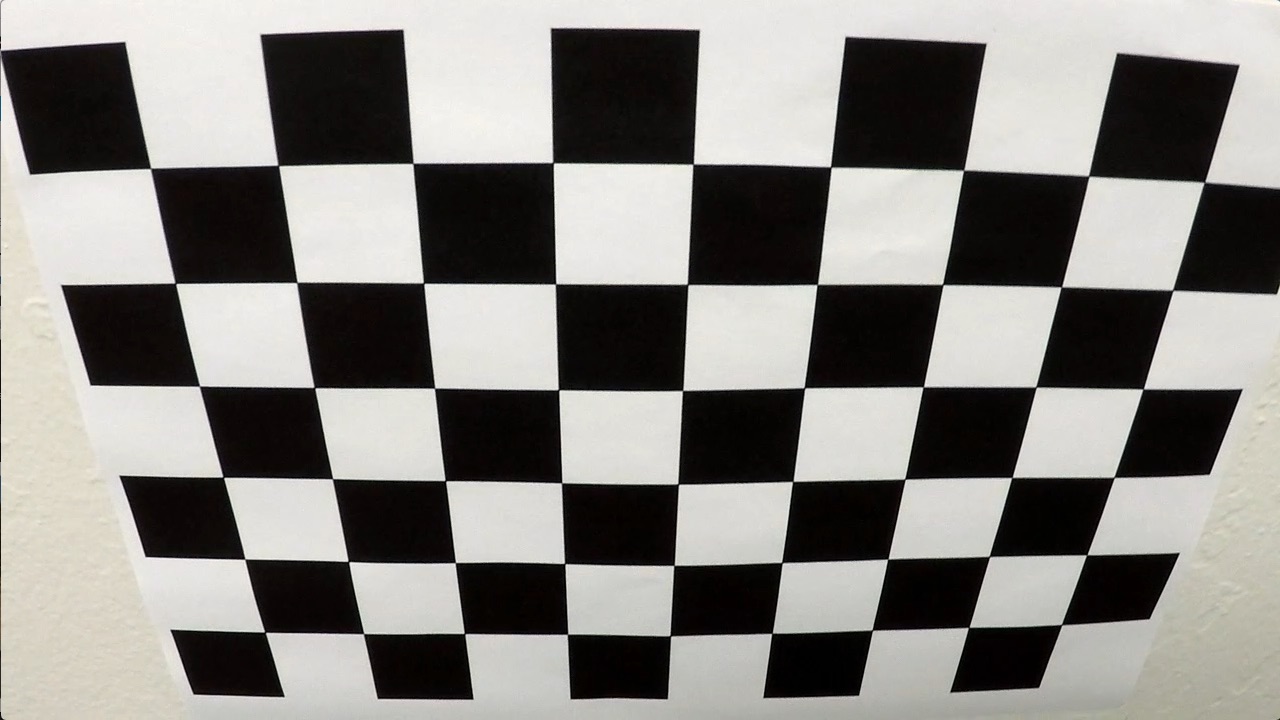
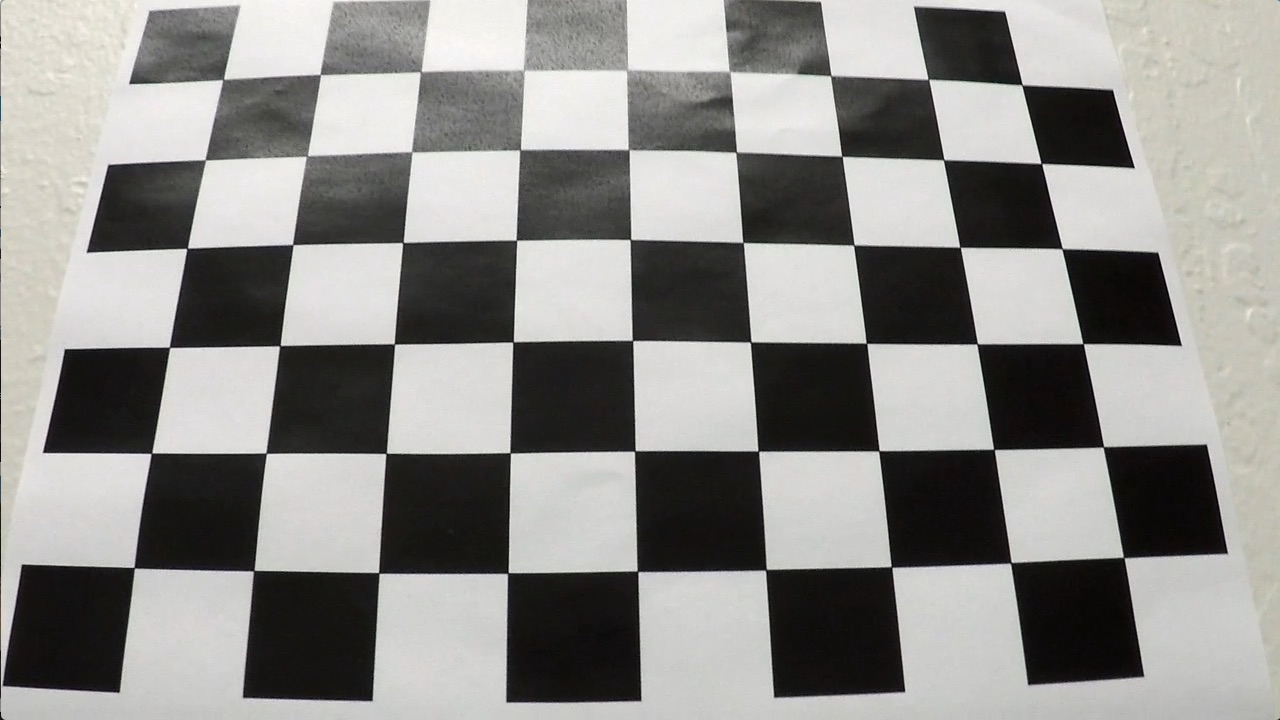
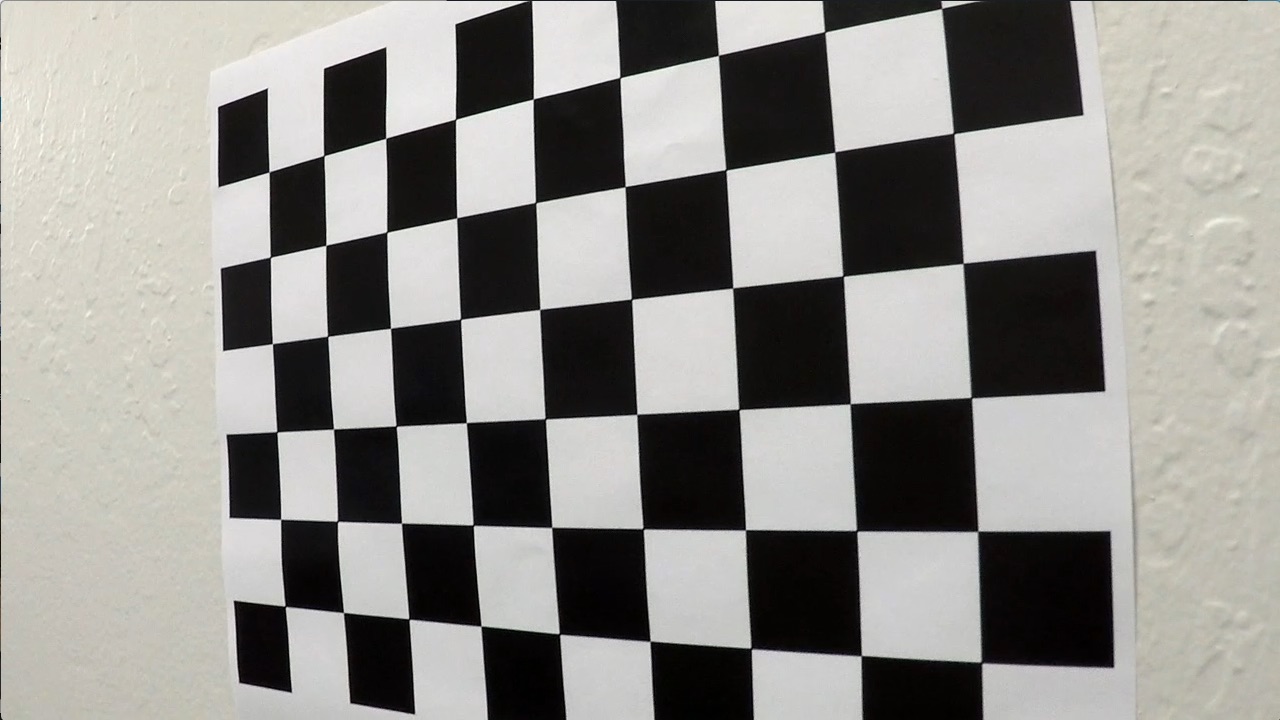
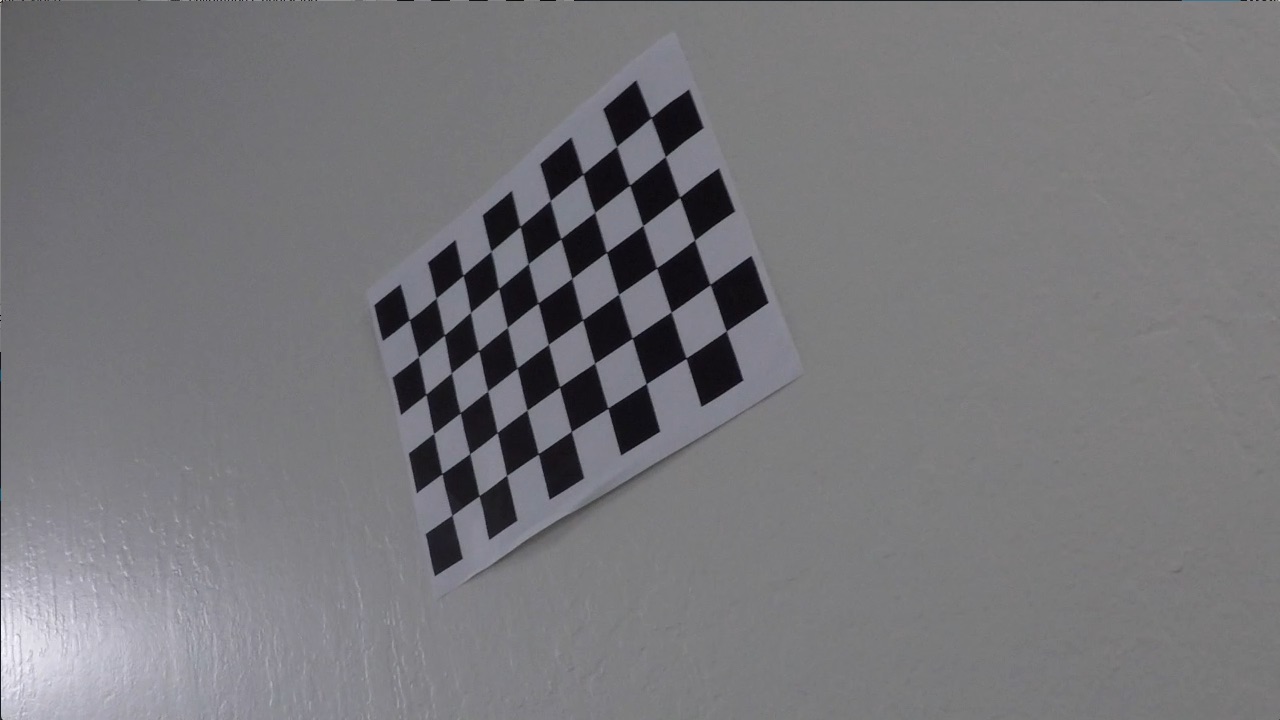
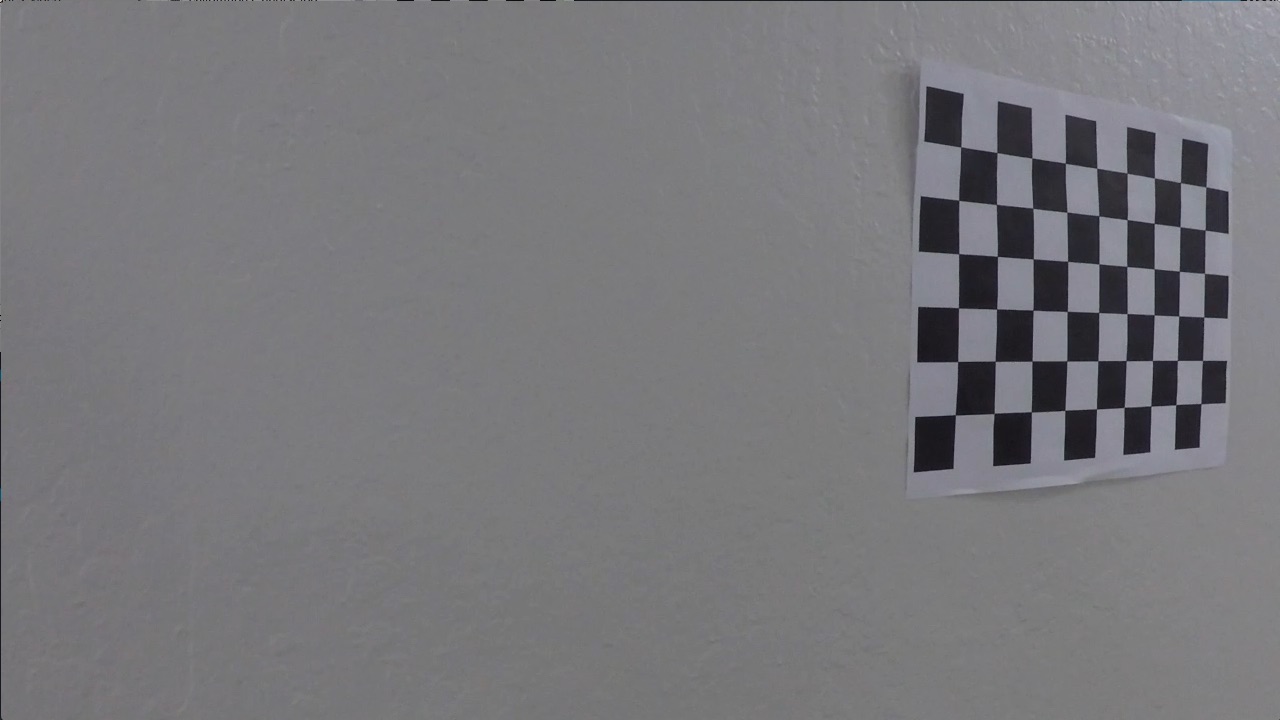
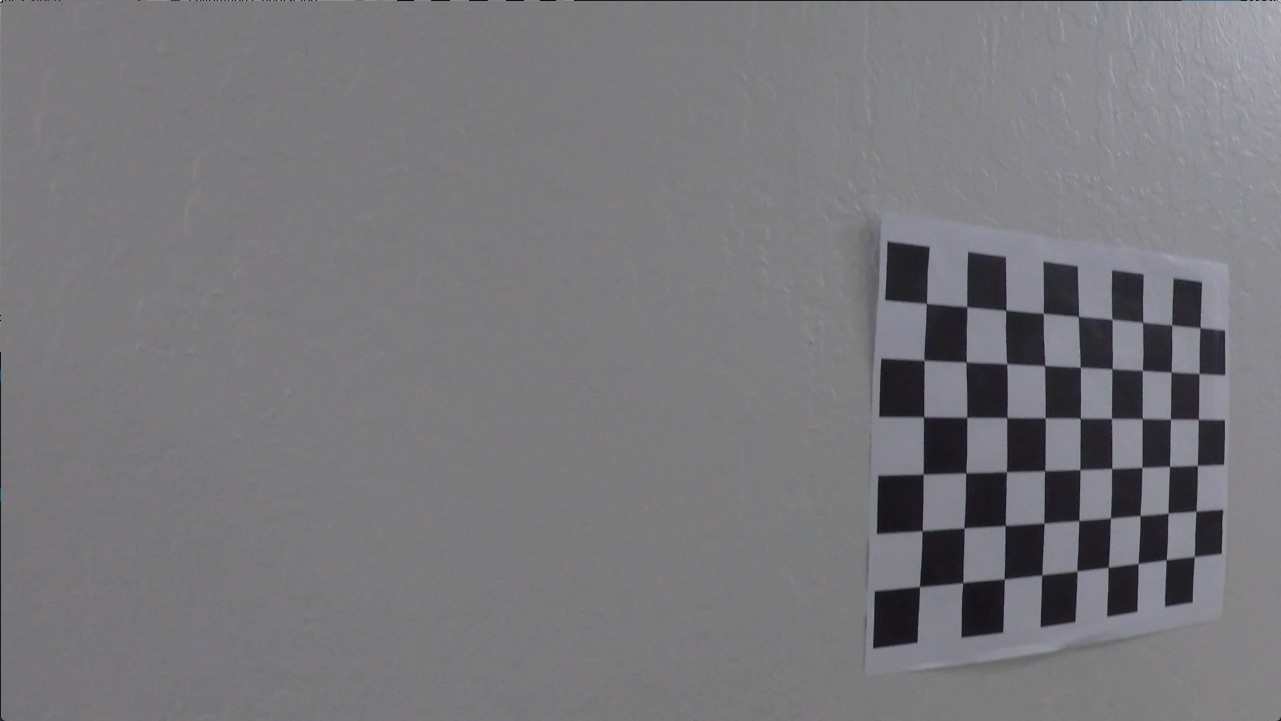
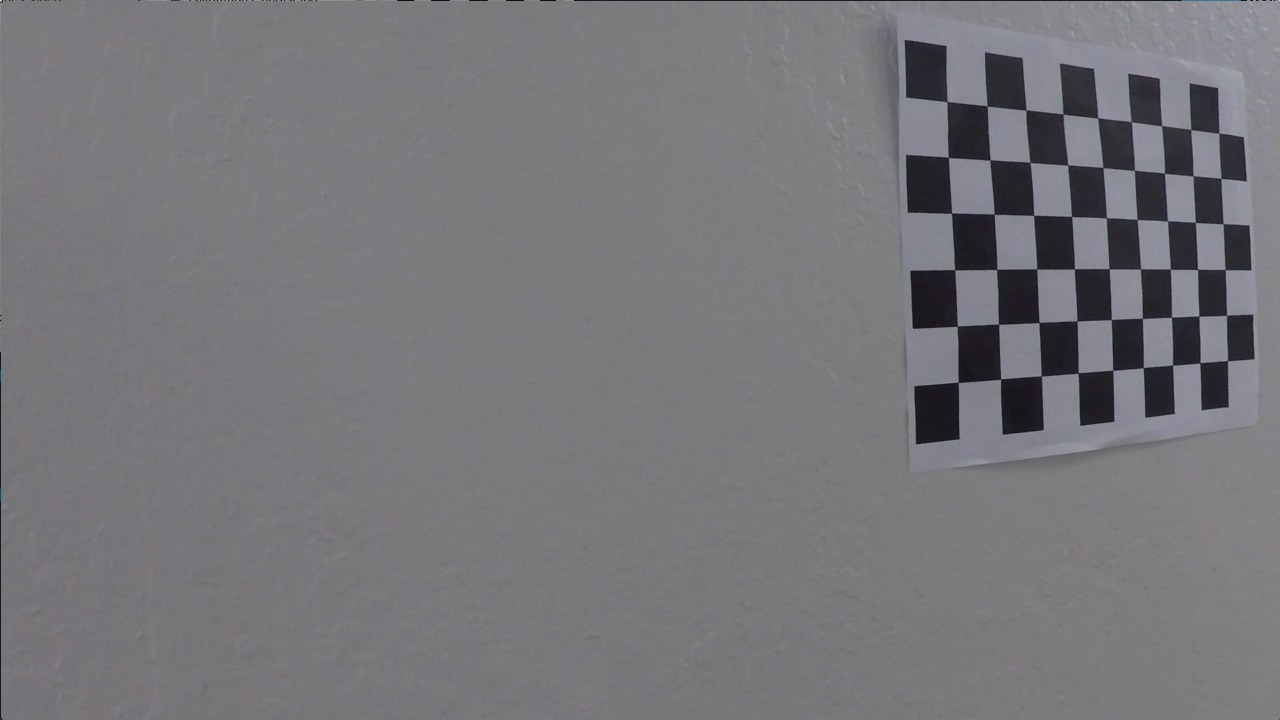
Just looking at the image, you can tell that our camera has a little bit of a fisheye effect... the lines of a checkerboard should be straight, but these lines apper to be curved, particularly near the edges. Therefore, to obtain calibration images, we printed out a checkboard, laid it flat on a surface, and took the following pictures from multiple angles and distances:
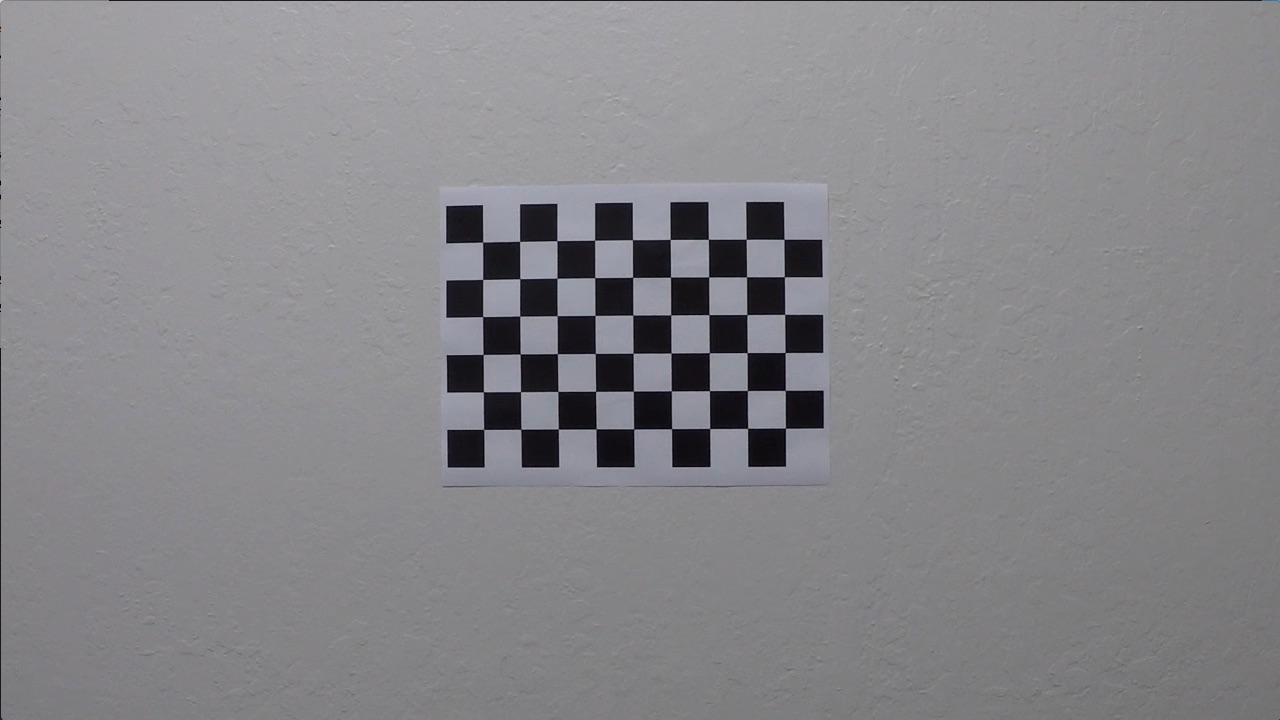
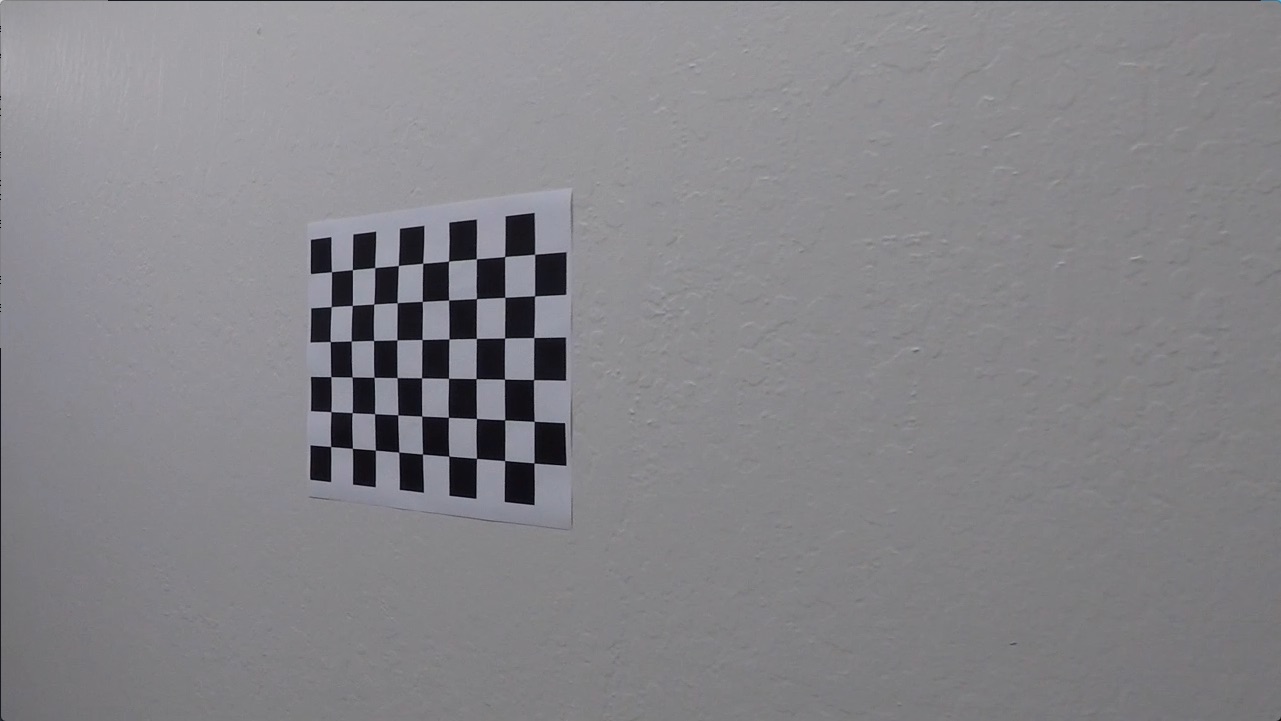
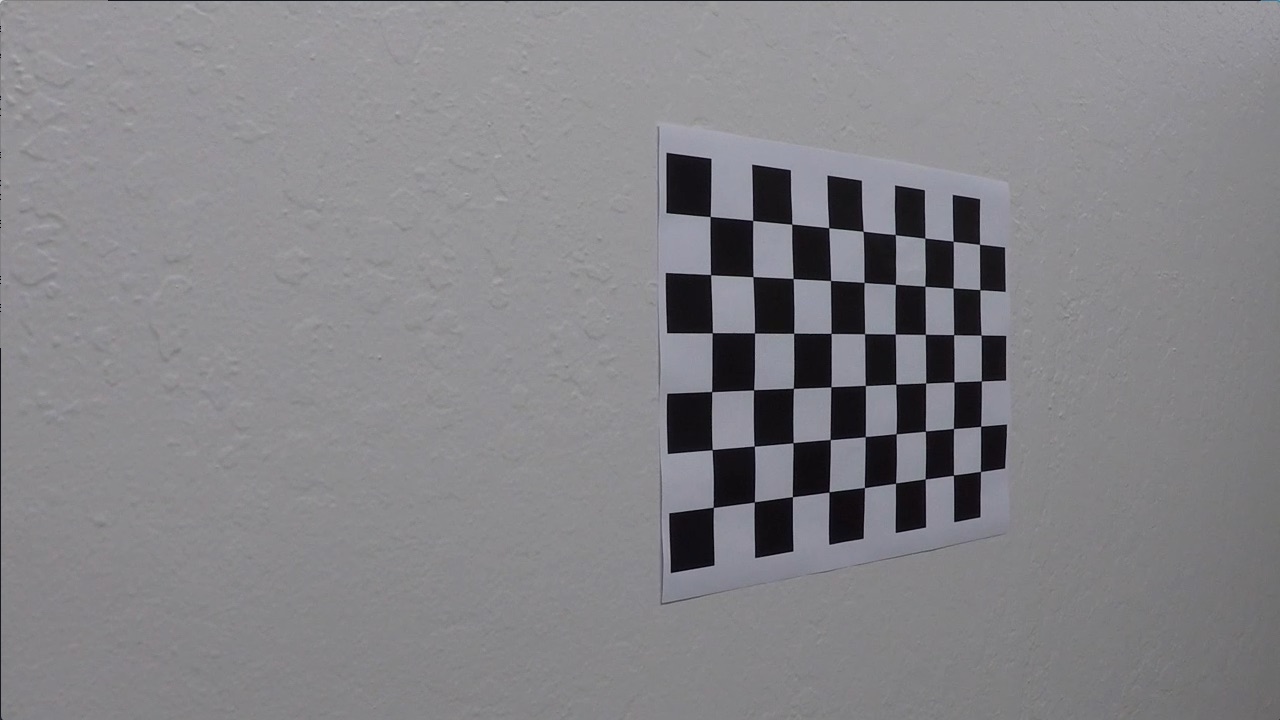
Ultimately, what we will be comparing are the locations of the interior checkerboard edges in the images (called the image points), and the locations where we know they should be (called the object points). For convenience, we have spun off a function for getting all of the points in points.py. Specifically, points.get will return all of the image points and object points from all of the images in a given directory. At its core, points.get just wraps cv2.findChessboardCorners with a lot of logic.
Note that we know where the points should be because we know that a checkerboard will have an evenly-spaced grid of points. We don't know the actual (X,Y,Z) coordinates of the camera relative to each checkerboard image. Those coordinates will be computed during the calibration process.
Once we have all of the image and object points, we can use cv2.calibrateCamera to calibrate the camera (which essentially boils down to a fancy curve fit by comparing where the detected corners are with where they should be). We wrapped this function in calibrationParams.py. Specifically, calibrationParams.get will return the calibration parameters given the image shape, the image points, and the object points. For convenience, this function will save some time by pickling the default calibration parameters and loading them if the default arguments are not overriden. We do this because the edge detection and calibration process can take relatively long, so pickling the calibration parameters signficantly speeds up the process of testing the rest of the pipeline.
The following code shows how to undistort a calibration and test image using these functions:
# Load some images
files = [ 'camera_cal/calibration1.jpg', 'test_images/test1.jpg' ]
bgrs = [ cv2.imread(file) for file in files ]
rgbs = [ cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB) for bgr in bgrs ]
# Get the checkerboard points in 2D and 3D space from a sequence of checkerboard images
objpoints, imgpoints = points.get()
# Compute the calibration parameters
ret, mtx, dist, rvecs, tvecs = calibrationParams.get(objpoints=objpoints, imgpoints=imgpoints, width=1280, height=720)
print('Calibration Finished')
# Create the object which can undisort images
undistorter = Undistorter(mtx,dist)
undistorteds = [ undistorter.undistort(rgb) for rgb in rgbs ]
# OR equivalently, load the pickled calibration parmeters
defaultUndistorter = Undistorter()
defaultUndistorteds = [ defaultUndistorter.undistort(rgb) for rgb in rgbs ]
# Show what the undistorted checkerboard looks like
fig, axs = plt.subplots(len(rgbs),3)
fig.subplots_adjust(hspace=0, wspace=0.01, bottom=0, left=0, top=1, right=1)
fig.set_size_inches(15,7)
images = [ [ rgb, undistorted, defaultUndistorted ] for rgb, undistorted, defaultUndistorted in zip(rgbs, undistorteds, defaultUndistorteds) ]
labels = [ 'distorted', 'undistorted', 'undistorted with pickled parameters' ]
for ax,imagez in zip(axs,images):
for a,image,label in zip(ax,imagez,labels):
a.imshow( image )
a.axis("off")
a.set_title(label)

Perspective Transform¶
The ultimate goal is to fit polynomials to the lanes, but from the perspective above, it is hard to tell exactly how the lanes curve in the distance. Specifically, if we tried to curve-fit the lanes at this point, chances are that the curve-fit would just yield straight lines. Hence we are going to warp the perspective of the images into a top-down (birdseye) view so that we can get a better idea of how the lanes are curving. For this purpose, we will use cv2.getPerspectiveTransform.
To use cv2.getPerspectiveTransform, we need to define 4 source and destination points (3 of which are not colinear) which define how to warp points from the source image to the destination image. We will use the four source points defined by the blue trapezoid in the following image, where the pixels within the blue trapezoid are stretched so that the upper corners are mapped to the upper corners of the warped image.
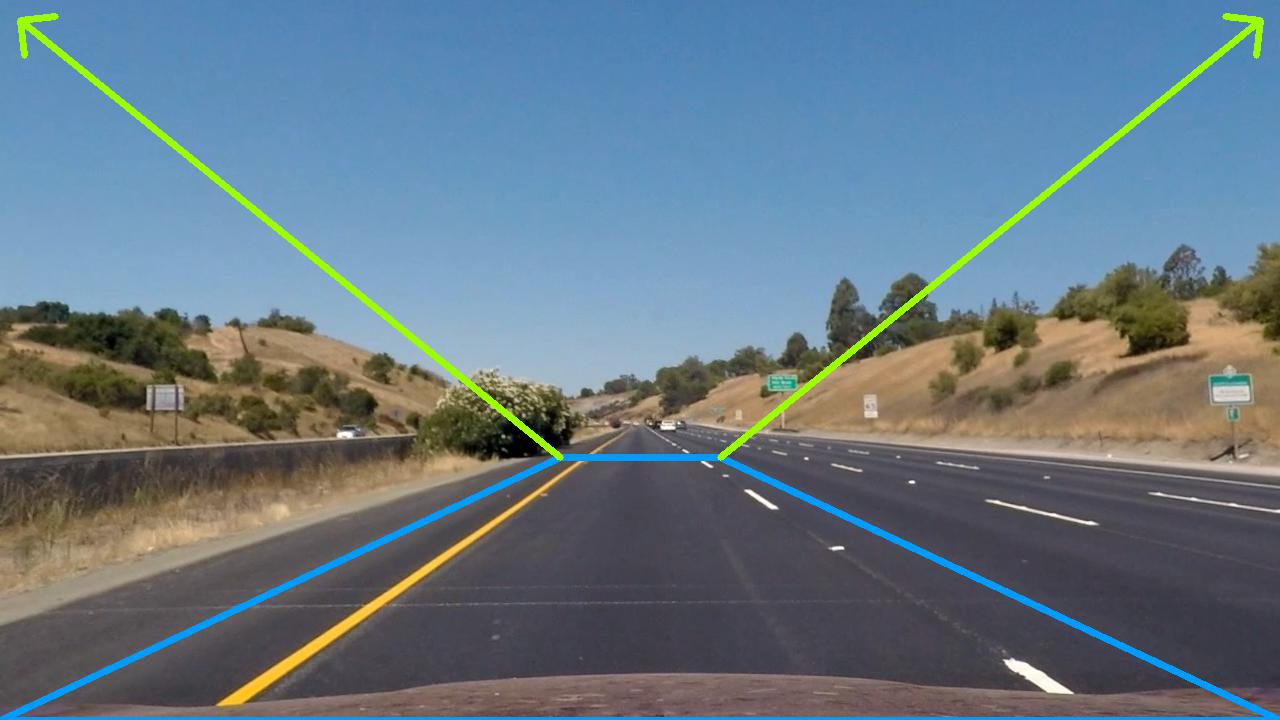
For example, the result of mapping the above image is:
which clearly shows that the lines are indeed straight. Applying the same transform to some other images, we get he following results:











To warp images programmatically, we have defined the Warper class in warper.py. The trapezoid is defined as a hard-coded percent of width and height, where the default width and height are width=1280 and height=720. If you use a different camera or change the image sizes, you will probably need to modify these values. If that occurs, then you need to choose new trapezoidal points which ensure that straight lanes are represented as straight lines after warping the images. Here is an example of how to use our Warper class:
# Load some images
files = [ 'output_images/test_images_undistorted/straight_lines1.jpg', 'output_images/test_images_undistorted/test1.jpg' ]
bgrs = [ cv2.imread(file) for file in files ]
rgbs = [ cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB) for bgr in bgrs ]
# Create the object which can warp an image to the desired birdseye view
warper = Warper()
warpeds = [ warper.warp(rgb) for rgb in rgbs ]
# Show what the undistorted checkerboard looks like
fig, axs = plt.subplots(len(rgbs),2)
fig.subplots_adjust(hspace=0, wspace=0, bottom=0, left=0, top=1, right=1)
fig.set_size_inches(15,7)
images = [ [ rgb, warped ] for rgb, warped in zip(rgbs, warpeds) ]
for ax,imagez in zip(axs,images):
for a,image in zip(ax,imagez):
a.imshow( image )
a.axis("off")

Detecting Lane Pixels¶
The last step before actually fitting polynomials to the lanes is to figure out which pixels correspond to lane pixels. To accomplish this, there are two predominate techniques, namely:
- By converting the image to a colorspace in which the lanes can be easily extracted.
- By applying an edge detection alogorithm which finds solid, continuous lines in the image.
Using Colorspaces¶
To understand what I mean by point 1), recall that pixels in images are typically represented in terms of their red, green, and blue (RGB) components (called channels), that is, a 1280 x 720 (width x height) image is actually represented by a 1280 x 720 x 3 array, where
image[:,:,0]is a 1280 x 720 x 1 array holding the red values of each pixel.image[:,:,1]is a 1280 x 720 x 1 array holding the green values of each pixel.image[:,:,2]is a 1280 x 720 x 1 array holding the blue values of each pixel.
Therefore if, in some alternate universe, lanes were painted red, then a good starting point for finding the lanes would be to look for pixels with relatively high values in image[:,:,0].
In a similar fashion, OpenCV provides many colorspace transforms which we can use to try to make it easier to detect lanes. For instance, using OpenCV, we can convert an RGB image into an image in the HSV, HSL, LAB, and grayscale colorspaces (among others). As a first easy test, we can try converting the images into these colorspaces and seeing if thresholding the image in one of these colorspaces can help us detect lanes. For convenience, we created the method split in colors.py which splits an image into its channels, where a channel value of 0 is represented by black, and a channel value of 255 (the maximum) is represented by white. Using this function, we can easily get a quick glimpse of whether a particular colorspace looks promising:
import cv2, colors, numpy
import matplotlib.pyplot as plt
def colorspaces( file, cspaces = 'all' ):
bgr = cv2.imread(file)
rgb = cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB)
gry = cv2.cvtColor(rgb, cv2.COLOR_RGB2GRAY)
# First, show the original and greyscale images
fig, ax = plt.subplots(1,2)
fig.set_size_inches(20,5)
fig.subplots_adjust(hspace=0, wspace=0, bottom=0, left=0, top=1, right=1)
ax[0].imshow(rgb)
ax[0].axis('off')
ax[0].set_title('Original')
ax[1].imshow(gry, cmap='gray')
ax[1].axis('off')
ax[1].set_title('Grayscale')
# Next, if cspaces = 'all', then show all of the color spaces
if cspaces is 'all':
cspaces = [ 'rgb', 'hls', 'hsv', 'lab', 'sobel' ]
# Next, show all of the other colorspaces that the user wants to see
for cspace in cspaces:
cspace = cspace.lower()
if cspace == 'rgb':
colors.split(rgb, horizontal=True, title="RGB")
elif cspace == 'hls':
hls = cv2.cvtColor(rgb, cv2.COLOR_RGB2HLS)
colors.split(hls, horizontal=True, title="HLS")
elif cspace == 'hsv':
hsv = cv2.cvtColor(rgb, cv2.COLOR_RGB2HSV)
colors.split(hsv, horizontal=True, title="HSV")
elif cspace == 'lab':
lab = cv2.cvtColor(rgb, cv2.COLOR_RGB2LAB)
colors.split(lab, horizontal=True, title="LAB")
elif cspace == 'sobel':
sabs = numpy.absolute(cv2.Sobel(gry, cv2.CV_64F, 1, 0, ksize=7))
sobelX = numpy.uint8(255 * sabs / numpy.max(sabs))
sabs = numpy.absolute(cv2.Sobel(gry, cv2.CV_64F, 0, 1, ksize=7))
sobelY = numpy.uint8(255 * sabs / numpy.max(sabs))
sabs = numpy.sqrt(sobelX ** 2 + sobelY ** 2)
sobelXY = numpy.uint8(255 * sabs / numpy.max(sabs))
sobel = numpy.zeros_like( rgb )
sobel[:,:,0] = sobelX
sobel[:,:,1] = sobelY
sobel[:,:,2] = sobelXY
colors.split(sobel, horizontal=True, title="Sobel (x,y,norm)")
else:
print('Unsupported colorspace:', cspace )
colorspaces('output_images/test_images_warped/straight_lines1.jpg', cspaces = ['rgb','hls','hsv','lab'])





Some comments are in order here:
The only noticeable difference between the RGB channels seems to be that the left (yellow) lane has a blue value of approximately zero (denoted by black), while the red and green channels are relatively high value (denoted by white). Perhaps we could try to detect yellow lanes by searching for pixels with low blue-values.
The lanes tend to be relatively bright with respect to the background, that is, they tend to have a high greyscale value. In HLS this corresponds to a high L-value, in HSV this corresponds to a high V-value, and in LAB this corresponds to a high L-value. So using brightness may be a way to help detect lanes. However, since the HSV and LAB channels are basically doing the same thing as grayscale, we will not use those colorspaces.
The S-channel in the HLS image seems to be highlighting both lanes, and is not dependent on the brightness of the image (although this is not immediately apparent from the above image).
None of the other channels seem to be obviously useful.
You might think we can stop here and call it a day, but let's break down another image and see how it looks in these colorspaces. Specifically, let's examine a frame from one of the videos:
colorspaces('output_images/project_video_warped/frame1044.jpg', cspaces = ['hls'])


Contrary to the previous image, the S-channel of the HLS colorspace does horrible for this image. Specifically, it seems like we the S-channel is erroneously high in the dark pixels produced by the shade of the tree. We will address this by combining the S-channel with another filter output.
Edge Detection with Sobel Filters¶
Sobel filters differentiate an image so that we can see the color gradient in an image in a particular direction. For instance, we can apply Sobel filters in the x- and y-directions, or compute the norm of these derivatives. Let's see wat happens when we apply Sobel filters to the previous image:
colorspaces('output_images/project_video_warped/frame1044.jpg', cspaces = ['sobel'])

Here we can see that although it is a little bit dark, the Sobel X filter seems to be capturing both lanes with very little noise. Let's try another image just to make sure we are not drawing erroneous conclusions:
colorspaces('output_images/project_video_warped/frame558.jpg', cspaces = ['sobel'])


Sure enough, looking at this new image, we see a lot of noise starting to creep in. However, just like with the S-channel results, this noise tends to occur at the dark pixels. So maybe we can try combining the S-channel results with these Sobel results while excluding dark pixels.
Putting it all together¶
We have seen some images where the S-channel of the HLS colorspace does a good job of detecting lane pixels and some images where the X-axis Sobel filter does a good job of detecting lane pixels. However, for both methods, we have found images where dark pixels appear to be producing erroneous results. Therefore we are going to try to apply the following technique:
We are going to look for pixels with high S-channel OR high Sobel X values, AND a high grayscale value.
There is one catch though... we cannot simply threshold the grayscale values in the absolute sense because poorly eluminated images would always fall below the threshold (even for the lane pixels), and highly illuminated photos would never get cut off. So what we are going to do is to only consider pixels in the greyscale image in the upper 50th percentile of brightness as potential lane pixels. Programmatically, our final filter will look like this:
def laneDetector(file):
bgr = cv2.imread(file)
rgb = cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB)
# Only consider pixels with a grayscale value in the upper 50th percentile
gray = cv2.cvtColor(rgb, cv2.COLOR_RGB2GRAY)
potentialLanePixels = gray >= numpy.percentile(gray, 50)
# Among those pixels, consider any pixels which have a relatively large Sobel X or S-channel vlaue
sabs = numpy.absolute(cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=7))
sobelX = numpy.uint8(255 * sabs / numpy.max(sabs))
potentialSobel = sobelX > 30
S = cv2.cvtColor(rgb, cv2.COLOR_RGB2HLS)[:, :, 2]
potentialS = S > 150
potentialLanePixels = potentialLanePixels & ( potentialSobel | potentialS )
fig, ax = plt.subplots(1,2)
fig.set_size_inches(20,5)
fig.subplots_adjust(hspace=0, wspace=0, bottom=0, left=0, top=1, right=1)
ax[0].imshow(rgb)
ax[0].axis('off')
ax[1].imshow(potentialLanePixels, cmap='gray')
ax[1].axis('off')
laneDetector('output_images/project_video_warped/frame1044.jpg')
laneDetector('output_images/project_video_warped/frame558.jpg')


Not too shabby...
Lane Fitting¶
At this point, we have detected which pixels are potential lane pixels. This process is not, and does not have to be perfect. We are going to fit 2nd order polynomials to the left and right hand lanes, so of course we expect there going to be outliers. The process of fitting lanes actually turns out to be surprisingly simple...
We split the image in half, and assume that pixels in the left half belong to the left lane, and pixels in the right half belong to the right lane.
We define our axes so that the origin of the coordinate system is in the bottom left hand corner of the image. The advantage of this parameterization is that when we define a polynomial (e.g. f(y) = ay^2 + by + c), the last coefficient c defines the point where the lane intercepts the bottom of the image.
We assume that the lanes have the same curvature. This means that the only difference between the left and right hand lane polynomials is the last coefficient (which defines the intercept). Specifically, we assume that the left-hand lane is of the form f(y) = ay^2 + by + c, and the right-hand lane is of the form g(y) = ay^2 + by + (c+d). Hence there are only four parameters that we need to optimize (a,b,c,d).
To help constrain the results, we enforce the constraint that the lane width is between 60% and 80% of the image width, and that the intercept of the left hand lane is between 0% and 50% of the image width.
To optimize the results, we use the
scipy.optimize.least_squaresfunction with asoft_l1regressor. The reason use should not use the standard least-squares loss is that it tends to weight outliers too heavily. (Believe me... I tried it, and it performs horribly.)
For convenience, we have have put this all together in the LaneFinder class of lanes.py, whose find method takes in an RGB image, and returns the same image with the lanes overlayed. The following code shows how to use this class (note that we are using the default Undistorter and Warper, but you can change those if desired):
import cv2
from lanes import LaneFinder
files = [ 'project_video/frame558.jpg',
'project_video/frame1044.jpg' ]
laneFinder = LaneFinder()
for file in files:
image = cv2.cvtColor(cv2.imread(file), cv2.COLOR_BGR2RGB)
laneFinder.find(image, display=True, showStats=False)


Computing the Lane Center and Curvature¶
Being able to detect the lanes is great, but to use them for autonomous driving, we will need to provide the position of the vehicle relative to lane center, and to find the curvature of the lane so that we know how to steer the car. However, one of the problems is that all of the fitting that we have done was done in "pixel" space, and the scales in the x- and y-axes are not equal in pixel space. For instance, in the above images, one pixel along the bottom of the image is equivalent to $\alpha = $ (3.7 / 700) meters. Similarly, one pixel along the side of the image is roughly equivalent to $\beta = $(30 / 720) meters. So we need to convert from pixel space to "real world" coordinates.
First off, calculating the deviation from the center of the lane turns out to be quite easy. So far, we have computed (in pixel space):
- A left-lane of the form: $x = ay^2 + by + c$
- A right-lane of the form: $x = ay^2 + by + c+d$
That means that
- The center pixel of the lane is given by $\frac{2c+d}{2}$
- The pixel deviation from the center of the lane is given by $\frac{2c+d-w}{2}$, where $w$ denotes the image width
- The deviation (in meters) from the center of the lane is given by $ \frac{\alpha(2c+d-w)}{2}$
Next, note that the curvature of a polynomial of the form $x = ay^2 + by + c$ at a point $y$ is given by $\dfrac{(1+(2ay+b)^2)^{3/2}}{|2a|}$. However, our polynomial is in pixel space. To convert our polynomial from points in pixel space $(x,y)$ to real-world coordinates $(x_r,y_r)$, we just need to use our relationships:
$x = \dfrac{ x_r }{ \alpha }$ and $y = \dfrac{ y_r }{ \beta }$
Hence substituting into our polynomial, we find that
$x_r = \dfrac{ a\alpha y_r^2 }{ \beta^2 } + \dfrac{ b \alpha y_r }{ \beta } + c \alpha$
Finally, computing the curvature of this polynomial at the bottom of the image ($y_r = 0$), we have that $curvature = \dfrac{(1+B^2)^{3/2}}{|2A|}$, where $A = \dfrac{ a\alpha }{ \beta^2 }$ and $B = \dfrac{ b \alpha}{ \beta }$.
Running this over the whole video yields the following results:
Discussion¶
A complete succes right?
Well there are, of course, a few things that could still be improved:
First of all, it might make more sense to do the polynomial fit in "real-world" coordinates. However, if you do this, you would again have to be very careful of the sensitivity to outliers in real-world space. Since points in the distance will tend to have a bigger deviation, it could turn out that you optimization just ends up fitting points in the distance. This would be bad because, just looking at the images, we can see that the points in the distance are the most warped, and hence the most likely to produce outliers.
Calibration, calibration, calibration. The lane deviation and curvature we computed are heavily dependent on the scale that we used to convert from pixel space to real-world coordinates. Those numbers should be as accurate as possible, otherwise the curvature and lane deviation metrics are useless.
Fine-tuning the warping parameters. The computation of the lane curvature will be particularly sensitive to the trapezoid used to warp the image. A lot of fine tuning and detailed analysis should be done to improve the warping parameters if the curvature numbers are to be trusted. If straight lines in the real world don't look straight after warping, then any discrecpancy will manifest iteslef in the estimated curvature.
So will this always work?
No.
The current pipeline is heavily dependent on the fact that the car is realtively close to the center of the lane. This is embedded in the constraints we used for the optimization problem, that is, that the left-lane exits the bottom left-half of the image, and the right-lane exits the bottom right half of the image. Furthermore, if the lane width was bigger or smaller than the values used in the constraints, clearly the optimization routine would ahve a hard time finding a good solution without violating the constraints.